



Collaborative robot measurement support system
This system was developed to reduce the work involved in measuring micro parts. A worker would strain to set the micro part into the measurement instrument. Collaborative robots support this measuring.
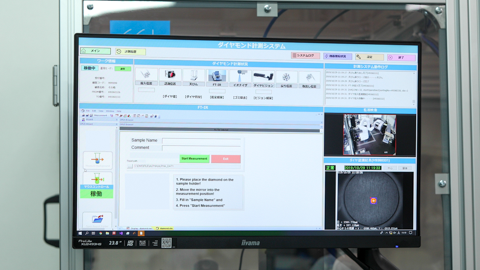
Our own optical system automatically detects the micro part placed onto the input table by the worker, uses AI to determine that it has been placed correctly, and transports it. Image processing is used to determine the outline and the center of the micro part transported to the robot work area, and the command to pick up is given.

The robot hand is moved based on the data transmitted from the vision system and reliably picks up micro parts that are in the order of millimeters in size. It then places the picked up micro part precisely at the measurement position of the designated instrument.
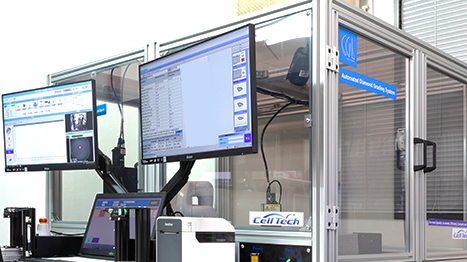
configuration
- ●Controlling computer
- ●Collaborative robots
- ●Vision system
- ●Automatic transport system




